http://93.174.130.82/news/shownews.aspx?id=94583597-752c-4b1b-b68a-cc675ef1c817&print=1
© 2025 Российская академия наук
Исследователи Санкт-Петербургского Федерального
исследовательского центра РАН (СПб ФИЦ РАН) совместно с учеными из Германии,
Сербии и Турции создали робототехнический комплекс (наземную сервисную
платформу с паркующимся на ней дроном), который поможет фермерам эффективно
выполнять различные виды сельхозработ (посев и сбор урожая, доставка грузов,
опрыскивание и полив культур). Разработка позволит автоматизировать выполнение
различных задач в аграрном секторе экономики, минимизировать усилия людей и
повысить их безопасность.
Робототехника сегодня активно внедряется в различные сферы
жизни и открывает большие возможности для повышения производительности труда
человека. В частности, интерес к применению роботов проявляют представители
агропромышленного комплекса. Машины имеют большой потенциал для
проведения посевных работ, сбора урожая, изучения местности и ландшафта,
высокоточного внесения удобрений и многих других задач.
Однако для применения роботов в аграрной сфере необходимо
разработать способы их эффективного использования, взаимодействия, а также
нужно создать удобные и понятные для человека интерфейсы управления.
«Мы разработали сельскохозяйственную роботизированную платформу, которая
направлена на снижение усилий людей при проведении различных видов аграрных
работ. Данный комплекс роботов позволяет пользователю экономить ресурсы и
время, повышая уровень дохода, что является основной задачей в любом
экономически затратном производстве», - рассказывает руководитель лаборатории автономных
робототехнических систем СПб ФИЦ РАН Антон Савельев.
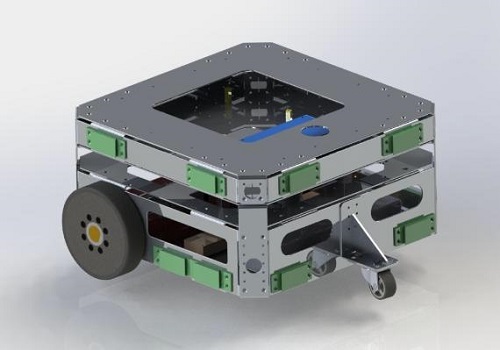
Разработанная модель комплекса представляет собой
гетерогенного робота (состоит из нескольких различных видов роботов). Наземная
автономная колесная платформа способна перемещаться по различным типам
сельхозугодий, имеет отсек для полезной нагрузки, модулей питания и
установленную сверху взлетно-посадочную площадку для дрона.
Для ориентирования на местности платформа снабжена сенсорной
системой, позволяющей объезжать препятствия и непроходимые участки ландшафта.
При этом для навигации комплекс использует как информацию спутниковых систем
(ГЛОНАСС), так и данные (фото, видео, аудио, радиосигналы), которые
оперативно собирает дрон. Для этого учеными СПб ФИЦ РАН были разработаны
алгоритмы локальной навигации и взаимодействия между роботами. Контроль за
гетерогенным роботом осуществляется с помощью специальных алгоритмов для
взаимодействия и управления всеми компонентами системы
«оператор-платформа-дрон» на основе интуитивно понятных решений, например, с
помощью жестов или голоса. Благодаря модульной конструкции на платформу можно
устанавливать различные виды шасси для повышения проходимости и других механизмов,
в зависимости от поставленных задач.
«Оснастив платформу системой полива или точечного опрыскивания
удобрениями, а также механизмом посева семян, можно получить наземного полевого
помощника, который заменит человеческий ресурс на тяжелой утомительной работе.
Его координатором является автономный дрон, который проводит анализ местности и
отправляет команды мобильной платформе с координатами для перемещения», - добавляет Антон
Савельев.
В ходе проекта исследователи также разработали несколько
прикладных сценариев (стратегий) совместного использования наземных платформ и
беспилотников для выполнения конкретных видов работ. Например, мониторинг
сельскохозяйственных угодий, сбор плодов с учетом картограмм урожайности
территорий, точное внесение удобрений и некоторые другие.
«Так, в ходе проекта совместно с зарубежными коллегами на основе
сценария по сбору плодов была разработана и успешно апробирована модель,
направленная на сбор яблок на сельскохозяйственном участке за счет
одновременного использования группы беспилотников и наземных платформ. Но эти
сценарии можно модифицировать и для выполнения любых других
сельскохозяйственных задач», - поясняет младший научный сотрудник лаборатории автономных
робототехнических систем СПб ФИЦ РАН Лебедев Игорь.
В целом разработанные в ходе проекта универсальные модели и
алгоритмы управления роботами, а также организации их взаимодействия в
дальнейшем могут применяться для решения задач с применением гетерогенных
роботов в других отраслях.
Разработка является результатом многолетней работы ученых
СПб ФИЦ РАН в сфере создания многоцелевых автономных робототехнических
платформ. Проект
поддержан международным грантом Российского фонда фундаментальных исследований
(проект РФФИ № 18-58-76001 ЭРА_а). В нем приняли участие ученые из Германии
(Университет телекоммуникаций Лейпцига), Сербии (Нови-Садский университет) и
Турции (Эрзурумский технический университет). Результаты работы 9 декабря были
представлены директором СПб ФИЦ РАН Андреем Ронжиным
на юбилейной встрече, посвященной 10-летию успешного сотрудничества между Россией
и ЕС в области исследований и инноваций по проектам РФФИ в Москве.