Ученые Института
прикладной математики имени М.В. Келдыша РАН (ИПМ
РАН) разработали алгоритм преодоления шестиногим роботом препятствия в
виде штабеля из трех цилиндров. Математическая модель робота научилась шагать
так расчетливо, что цилиндры не разъезжаются под ее ногами.
Шагающие машины и, в частности, инсектоморфные (то есть
имеющие несколько ног, схожих по кинематике с ногами насекомых) роботы,
теоретически могут успешно преодолевать весьма сложные препятствия, включая,
например, подъем по пожарной лестнице. Однако встречающиеся в естественной
среде завалы из стволов деревьев бывают очень разнообразными, а при
неосторожном поведении бревна могут покатиться под весом робота. Поэтому проблемы
выбора опорных точек в процессе преодоления таких препятствий требуют
специального исследования.
Ученые ИПМ РАН рассмотрели задачу преодоления препятствия в
виде штабеля из трех параллельных прямых круговых шероховатых цилиндров,
лежащих на горизонтальной плоскости. Равновесие цилиндров должно сохраняться в
случае, когда робот наступает на них.
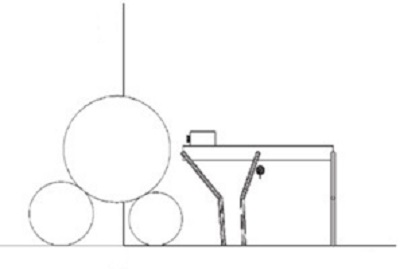
Робот перед
препятствием. Жирной точкой обозначено положение центра тяжести робота.
Робот моделировался в виде твердого корпуса, имеющего форму
прямоугольного параллелепипеда, по бокам которого симметрично прикреплены шесть
одинаковых инсектоморфных ног. Точки прикрепления ног с каждой стороны корпуса
расположены на одинаковом расстоянии друг от друга. Отдельная нога состоит из
двух твердых звеньев: бедра и голени. Управление движением реализуется
посредством компьютерного моделирования работы электромеханических приводов
шарнирных узлов. Выполнение требуемого движения робота осуществляется, как и в
реальности, лишь в результате подачи значения управляющего электрического
напряжения на модели электромеханических приводов.
Найти точное математическое решение поставленной задачи
несложно, однако такой результат, будучи достаточно громоздким, не представляет
практического интереса из-за того, что в реальных условиях параметры цилиндров
будут заранее неизвестны, а определить их затруднительно. Однако из этого
решения ясно, что если возникла необходимость создать меньшую нагрузку на
первый цилиндр в основании штабеля, то силу F надо направлять ближе к
точке опоры второго цилиндра, и, наоборот, если мы хотим разгрузить второй
цилиндр, то силу F надо направлять ближе к точке опоры первого
цилиндра.
На основании этого вывода можно сформулировать рекомендации,
касающиеся поведения робота при преодолении завала из бревен: если в основании
штабеля лежат приблизительно одинаковые бревна, то линия действия силы в точке
опоры робота о верхнее бревно должна проходить приблизительно через середину
основания препятствия. При необходимости уменьшения опасности проскальзывания
какого-либо нижнего цилиндра силу, действующую со стороны ног на верхний
цилиндр, следует направлять ближе к точке опоры другого нижнего цилиндра. Если
система цилиндров до опоры шагающего аппарата была неподвижной, то при
выполнении рассмотренных выше условий равновесие при опоре о нее робота не
нарушится и система останется неподвижной.
Из-за неустойчивости системы в целом последовательность
действий робота будет зависеть от высоты преодолеваемого штабеля. Были
рассмотрены два варианта. В первом из них (низкий штабель) высота препятствия
приблизительно совпадает с маршевой высотой робота, а во втором (высокий
штабель) она в 1,5 раза превышает маршевую высоту робота.
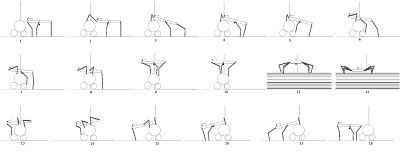
Последовательность
действий робота при преодолении низкого штабеля. Интересно, что первый шаг
робот делает с опорой на дальнюю сторону верхнего бревна, чтобы не нарушить
равновесие штабеля. Обратите внимание на этапы 11 и 12: взобравшись на штабель
(10), робот начинает боковое движение вдоль штабеля (11), чтобы найти
подходящее место для спуска, затем припадает к бревну (12) и начинает спуск
(13).
На каждом этапе преодоления препятствия робот таким образом
перемещает центр тяжести и выбирает такие точки опор передних, средних и задних
ног, что его вес не нарушает равновесия бревен в штабеле. Задача осложнена
дополнительным условием: первоначально робот движется в направлении,
перпендикулярном осям цилиндров, и не видит участок опорной плоскости за
препятствием. Если в процессе движения робота будет установлено, что опорная
плоскость за препятствием непосредственно по курсу движения робота непригодна
для спуска, то робот, находясь на препятствии, должен изменить свое положение
на нем так, чтобы спуститься с препятствия в доступном для опоры месте.
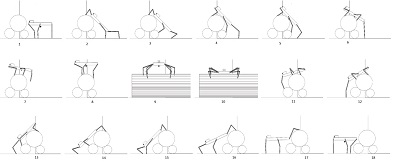
Последовательность
действий робота при преодолении высокого штабеля. Здесь также есть этап
бокового перемещения по верхнему бревну (9) в поисках удобного для спуска
места.
В результате проведенного учеными ИПМ РАН исследования была
установлена принципиальная возможность преодоления препятствий в виде штабеля
из трех бревен, имеющего высоту, существенно превосходящую характерные размеры
робота. Аналитически получены условия устойчивости штабеля при действии на него
ограниченных сил сухого трения и трения качения, а также активной
равнодействующей сил, возникающих из-за опоры робота на штабель. Сформулированы
простые правила, руководствуясь которыми робот может выбирать надежные точки
опоры на препятствии и направления действия сил в точках опоры для сохранения
равновесия системы. Построены алгоритмы залезания робота на штабели разной
высоты. Предложенные алгоритмы формирования движения робота при преодолении
указанных препятствий были отработаны средствами компьютерного моделирования,
которые автоматически реализуют расчет взаимодействия трехмерной полной
динамической модели робота и окружающих его объектов с учетом сил кулоновского
трения, трения качения и моделей электромеханических приводов в шарнирах
робота. Результаты компьютерного моделирования свидетельствуют о принципиальной
реализуемости предложенного алгоритма.
Подробнее см. в
«Преодоление инсектоморфным роботом препятствия в виде штабеля из шероховатых
цилиндров». Ю. Ф. Голубев, В. В. Корянов, «Известия РАН. Теория и системы
управления», 2022, № 2, стр. 120-136.
Редакция сайта РАН